1. Conceptos preliminares:
1.1. Magnitudes físicas: Son cantidades que se pueden medir mediante un sistema físico, es decir, cantidades a las que se les puede asignar un valor al compararlas con parámetros establecidos, por ejemplo: longitud, peso, tiempo, velocidad, etc.
1.1.1. Clasificación:
1.1.1.1. Por su naturaleza:
1.1.1.1.1. Escalares: Son las magnitudes que únicamente necesitan de un número y una unidad (módulo) para estar completamente definidas; por ejemplo: tiempo (3 horas), temperatura (6°C), masa (25 kg), etc.
1.1.1.1.2.Vectoriales: Son aquellas que necesitan de un módulo, una dirección y un sentido para ser completamente definidas, por ejemplo: aceleración (aceleración de un carro), fuerza (fuerza de un resorte), velocidad (velocidad de un avión), etc. Son representados por un vector.
1.1.1.1.3. Tensoriales: son las que caracterizan propiedades o comportamientos físicos modelizables mediante un conjunto de números que cambian tensorialmente al elegir otro sistema de coordenadas asociado a un observador con diferente estado de movimiento o de orientación. Un ejemplo es el campo tensorial.
1.1.1.2. Por su origen:
1.1.1.2.1. Fundamentales: Son la base de las demás magnitudes físicas. Son siete: longitud, masa, tiempo, temperatura
termodinámica, intensidad de corriente eléctrica, intensidad luminosa y cantidad
de sustancia.
1.1.1.2.2. Derivadas: Se expresan en función de las magnitudes principales, por ejemplo: velocidad, aceleración, fuerza, trabajo, presión, etc.
2. Definición: Un vector es un ente matemático representado por un segmento de recta orientado (similar a una flecha).Se usa representar magnitudes vectoriales.
3. Notación (usando la imagen del punto 4): A se lee: "Vector A" (en los textos escritos se representa con una flecha encima de la letra, como se aprecia en la imagen)
4. Elementos:

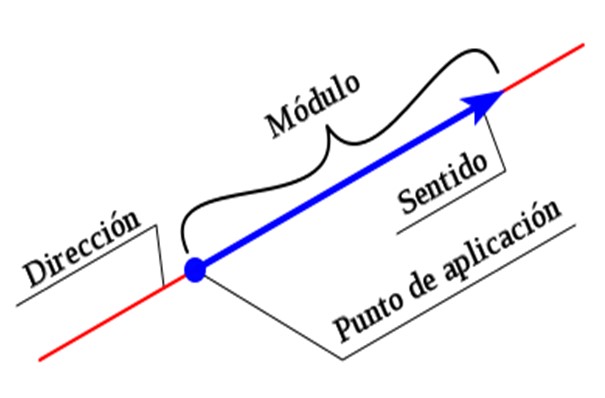
4.1. Sentido: Es la orientación del vector. Se representa por la punta de la flecha.
4.2. Dirección: Es la línea de acción del vector. Su orientación es determinada por el ángulo que forma el vector con el semieje positivo X.
4.3. Punto de origen: Es el punto en el que entran en contacto el vector y el semieje positivo X.
 4.4. Módulo: Es la longitud del vector. Se representa así : |A| (En los textos escritos se representa con la flecha encima de la letra). Se halla con la siguiente fórmula:
4.4. Módulo: Es la longitud del vector. Se representa así : |A| (En los textos escritos se representa con la flecha encima de la letra). Se halla con la siguiente fórmula:
Donde u1, u2 y u3 son los puntos en los ejes x, y, z, respectivamente.
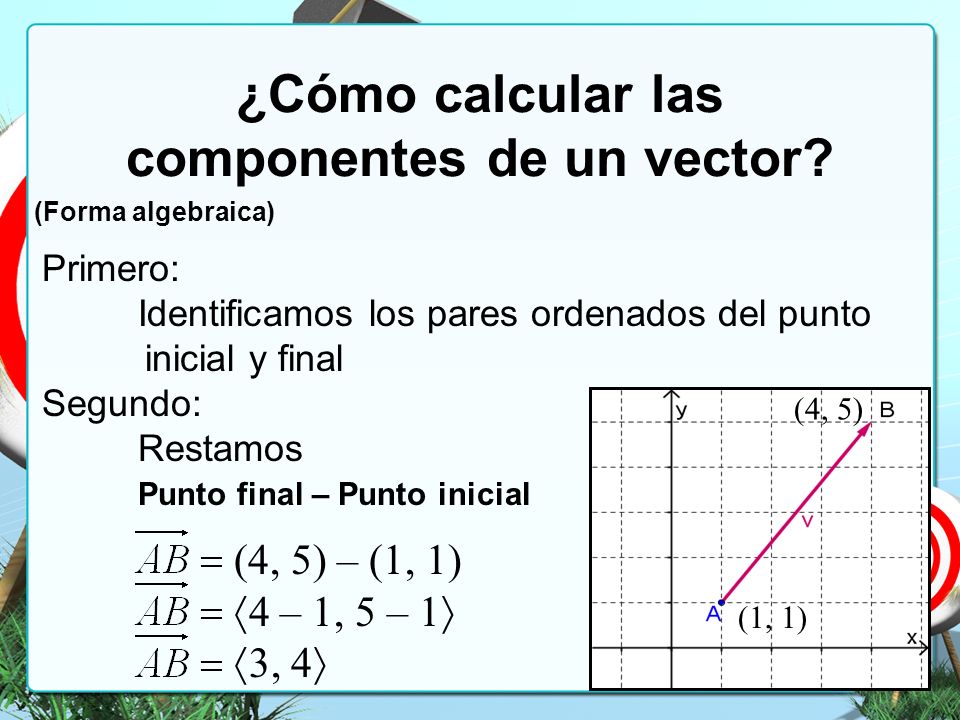
5. Representación de vectores como pares ordenados: Lo más recomendable es trasladarlos al origen, para que así podamos calcular las coordenadas del vector en base a las de la cabeza de la flecha. Sin embargo, existe otra forma, que es la que detallaré a continuación:

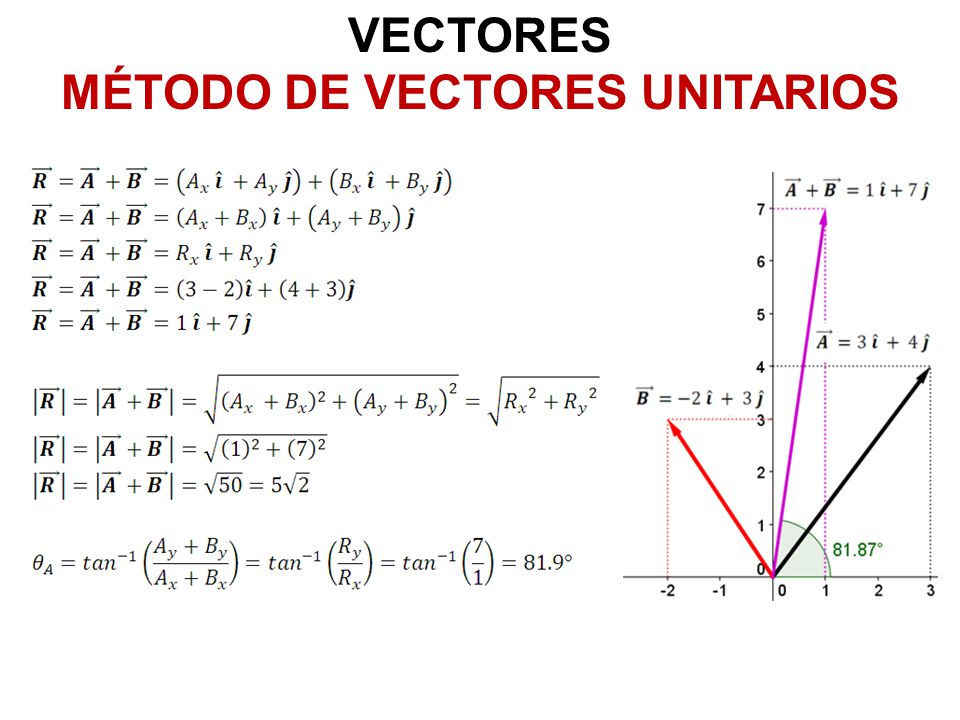
6. Vectores unitarios: Son vectores sin dimensión. Se usan para especificar una dirección conocida y no tienen otro significado físico. Son útiles exclusivamente como una convención para describir una
dirección en el espacio. Se usarán los símbolos ˆi, ˆj y ˆk para representar los vectores unitarios que apuntan en las direcciones x, y y z positivas, respectivamente.

7. Igualdad de vectores: Dos vectores son iguales si tienen el mismo módulo y la misma dirección.

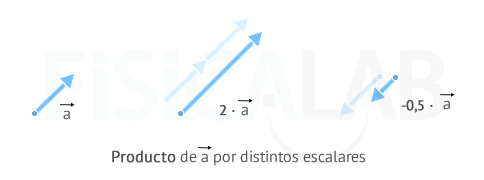
8. Multiplicación de un vector por un escalar: Si tenemos un vector A y una cantidad escalar k, el vector kA es paralelo al vector A y su dirección es determinada por la cantidad escalar.
9. Opuesto de un vector: El opuesto de un vector es el mismo vector pero con la dirección contraria.


10. Operaciones con vectores: A continuación, se mostrarán diversas manera de operar vectores. Cabe resaltar que el resultado de una operación de vectores recibe en nombre de resultante (R o la letra con una flecha encima.)
10.1. Pares ordenados:
10.1.1. Suma: Se suman sus componentes.
10.1.2. Resta: Se restan sus componentes.

10.2. Vectores paralelos: Se suman si van a la misma dirección y se restan si van en direcciones contrarias. Además, la resta de dos vectores es la suma de un vector con el opuesto del otro.

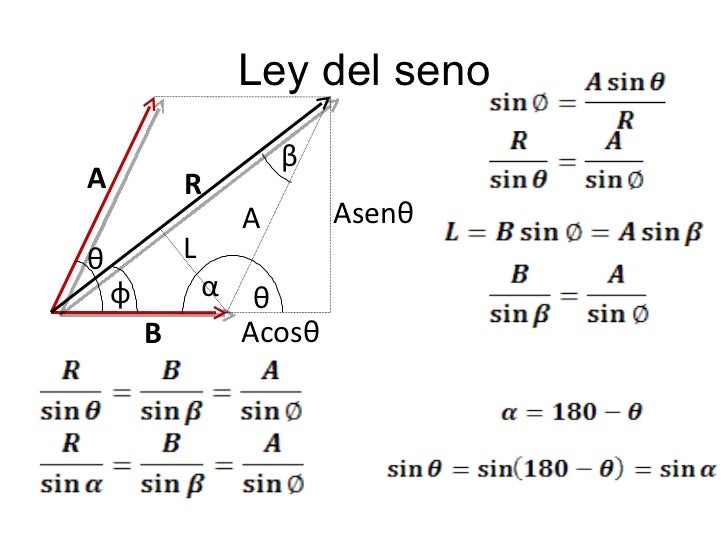
10.3. Método del triángulo: Se utiliza para hallar la resultante de dos vectores. Consiste en ubicar los vectores uno a continuación del otro, unidos mediante la cabeza de uno con la cola del otro. El vector resultante se obtiene uniendo la cola del primero con la cabeza del último.


10.4. Método del polígono: Es similar al método del triángulo, con la diferencia de que se utiliza cuando hay más de dos vectores. Consiste en unir mediante la cabeza y la cola todos los vectores. El vector resultante se obtiene uniendo la cola del primero con la cabeza del último.

Dato: Si todos los vectores de un sistema (sea aplicando el método del triángulo o el del polígono) forman un circuito cerrado, el vector es nulo (su módulo es igual a cero).
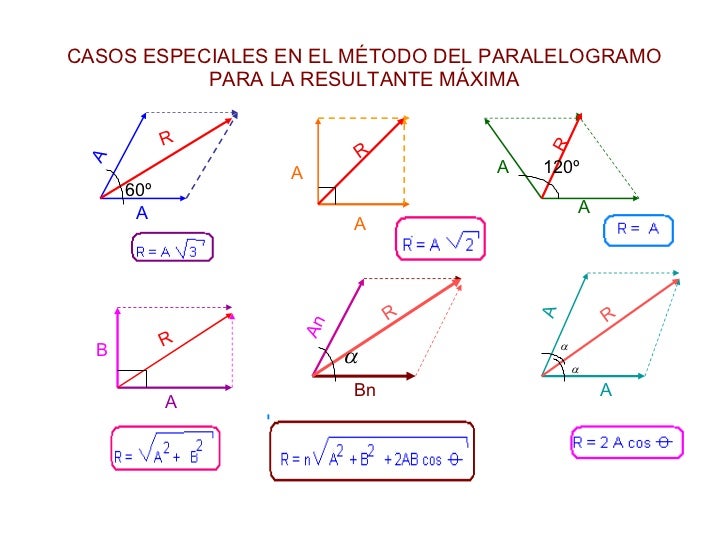
10.5. Método del paralelogramo: Para utilizar este método lo que hacemos es trazar rectas paralelas a cada uno de los dos vectores que queremos sumar en el extremo del otro vector. Luego trazamos la resultante desde el origen hasta el punto en el que se cruzan ambas rectas.


Dato: Casos especiales:
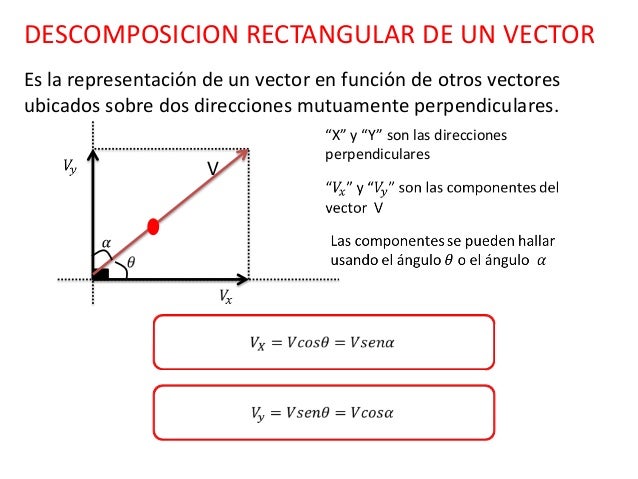
10.6. Descomposición rectangular de vectores: Se de cuando se representa aun vector como la suma de vectores perpendiculares.
11.Fuentes: http://www.cepb.una.py/web/images/pdf/2020/ejercitarios/1curso/FISICA.pdf, https://www.cem.es/sites/default/files/siu8edes.pdf, https://sdvsfjulian.wordpress.com/i-corte/magnitudes-fisicas/tipos-de-magnitudes-fisicas/magnitudes-tensoriales/, https://es.wikipedia.org/wiki/Campo_electromagn%C3%A9tico, https://edwincadc.wordpress.com/magnitudes/magnitudes-escalares-vectoriales-y-tensoriales/, https://matemovil.com/fisica/, https://es.wikipedia.org/wiki/Vector, https://www.fisicapractica.com/metodo-del-paralelogramo.php, https://fisicaenpdf.blogspot.com/2018/11/descomposicion-rectangular-vectores.html, Cerebrito (Ed. Megabyte), La Guía Científica (Ed. Lumbreras), Física para ciencias e ingeniería Vol. I (Cengage Learning).
Comentarios
Publicar un comentario